Станок для намотки катушек медным проводом виток к витку, но теперь программируемый с электроприводом. Управляет станком микроконтроллер Atmega328P, а в качестве привода осей намотки и укладки были использованы два шаговых электродвигателя типа EM434 от старого принтера и два драйвера A4988. Для визуального отображения вводимых команд и настроек станка был применен жидкокристаллический дисплей LCD1602 с модулем для подключения по шине I2C. Настройка и ввод команд осуществляется шестью не фиксируемыми кнопками.
Основные настройки, отображаемые на экране.
В первой строке: F - (frame height - высота катушки), W - (wire diameter - диаметр провода), L (layers number - число слоев), все значения вводятся в миллиметрах. Вторая строка информативная: N - (number turns - число витков) рассчитанное программой. C - (counter - счетчик) считает обороты с помощью щелевого оптического датчика во время исполнения программы. D - (direction travel - направление перемещения поводка), L - влево и R – вправо.

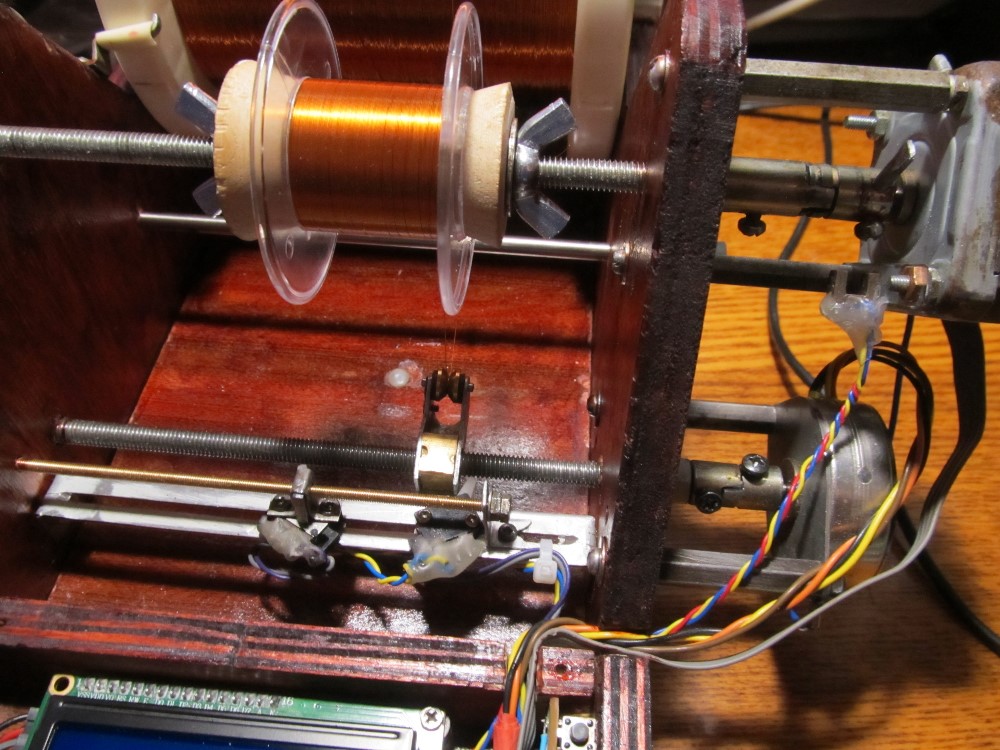
В зависимости от расположения провода перед пуском можно выбрать от какой стороны катушки начнется намотка, достаточно перед стартом нажать рычажок одного из двух конечных выключателей, и программа изменит направление вращения вала. Один концевой выключатель закреплен неподвижно на пластине с прорезью, а второй можно перемещать с помощью дополнительного длинного винта (шпилька М3х140 мм), здесь ходовая гайка вставлена в п-образный кронштейн, который в свою очередь скреплен с выключателем и при вращении винта меняется его положение. Регулировка необходима для ограничения хода и зависит от размера каркаса катушки или длины намотки. Контакты залиты клеевым пистолетом. Верхняя ось (шпилька М6х200мм) предназначена для крепления каркаса наматываемой катушки и нижняя ось (шпилька М6х200мм) по которой движется ходовая гайка внутри удлинённого п-образного кронштейна с другой стороны которого закреплен небольшой шкив поводок. Обе оси установлены на шариковых подшипниках 1000096. Муфты для соединения валов шаговых двигателей с осями изготовлена из отрезков толстостенных трубок.

Внутренний диаметр которых рассверлен под размер валов и осей. Сбоку в стенке трубок просверлены по одному отверстию под резьбу и винт М3 для быстрой фиксации (прим. одна муфта имеет дополнительное резьбовое отверстие в него ввернут флажок для оптического датчика). С одного конца каждой трубки с торца вырезаны пазы и выступы получается, как кулачково-дисковая муфта. Рама станка выпилена из фанеры 9мм., все размеры произвольные только ширину брал от большой катушки см. фото. Шесть кнопок распаяны на узкой монтажной плате: (одна пусковая, две чтобы увеличить или уменьшить диаметр провода, одна кнопка для переназначения двух предыдущих, на добавить и убавить длину намотки, и две для изменения количества слоев. Перед пуском после ввода значения W-диаметр провода программа определит с какой скоростью необходимо перемещать поводок чтобы уложить провод виток к витку. Верхний мотор EM434 (200 шагов) драйвер A4988 настроен на полный шаг. Нижний мотор который без имени (100 шагов), для него на драйвере добавил перемычку для работы в режиме ½ шага. Микроконтроллер Atmega328P и модули A4988 размещены на монтажной плате (50х70 мм) на распаянных панельках под микросхемы. Также припаян 6-контактный разъем, который необходим для прошивки контроллера, например для правки кода или других изменений.

В качестве программатора использована плата Arduino Uno, настройка описана в предыдущей публикации. Также в одной из предыдущих статей описан способ подключения щелевого оптического датчика. Код управления станком создан с помощью программы для визуального программирования FLProg. см. рисунок выше. В качестве источника питания применен готовый импульсный сетевой адаптер 9В и ток 1А, на драйверы моторов подается 9В, а на логику и микроконтроллер Atmega328P, через небольшой модуль стабилизатор, выполненный на микросхеме LM317, настроенный на 5 вольт. Изначально действующая модель была собрана на пластиковой макетной плате на Arduino Nano, когда более-менее все отладил, после этого перезолил код в контроллер Atmega328P и спаял всю схему. Настройка станочка незакончена необходимо протестировать, работа продолжиться.





Комментариев нет:
Отправить комментарий